Quadruped
Quadruped
Dazymas ir tiuningas pries pasirodyma Klaipedoje? 
Jeigu duos - parodysiu 
su šešiomis kojomis jau būtų visai  normalus
normalus 
Na 4 ir 6 koju robotai skiriasi biski daugiau nei tik koju skaiciumi, man 4 koju labiau patiko
Patiko tai patiko, bet kaži ar jis normaliai paeis… Virs ant šono kad ir vieną koją pakėlus…
kažkaip ir man atrodo, kad lygioje vietoje jis kaip tik ant ribos pusiausvyrai išlaikyti, betgi lygioje vietoje ratai geriau už kojas
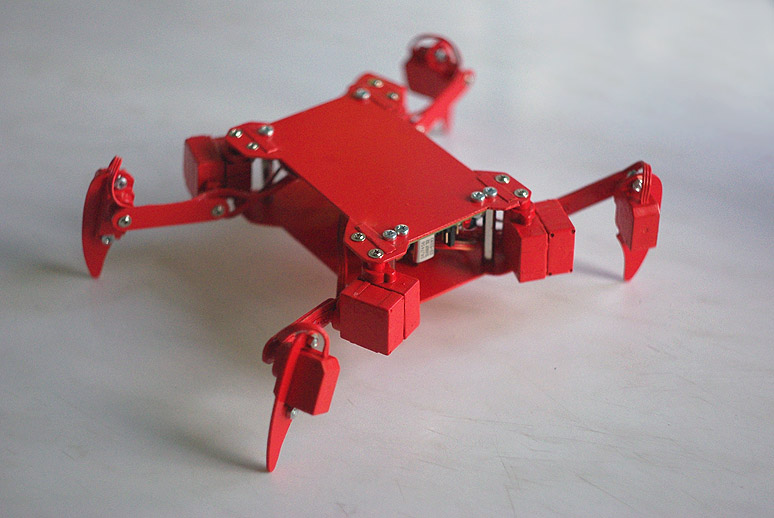
Na, autorius yra nutylėjęs, kad šitas sutvėrimas jau vaikšto, o šitas paveikslas yra dažymo schemai pažiūrėti. Jei nesupyks, mestelsiu linką: youtube.com/watch?v=Js3FX0SDAQsTiesa, pats autorius sakė, kad vaikščiojimą dar dailins, nors mane tai ir šitame filmuke visai nustebino keturkojo sugebėjimai.
Čia jau yra nudažytas robotas, čia yra realus vaizdas, ne 3D modelis. Autorius jau perprogramavo vaikščiojimo algoritmą, gal parodys, nežinau.
kritinėja labai gražiai, atrodo, kaip gyvas sekantis žingsnis bus trys kojos … ir taip iki rato ot tai bus atradimas
gerai, kad pastebėjai  būtume nežinoję patys
būtume nežinoję patys
o aš ir galvoju - kokia krūta 3D modeliavimo programa - padaro iliuziją, kad nesufokusuotas tolimesnis planas
dauguma DOF’a padaro…
labai gražiai “vaikšto” neatrodo, kad mašina, galima sakyti, imituoja gyvūną o kas jam gaunasi nelygiu paviršiumi? ar yra pranašumų prieš ratą dar be regimo įspūdžio?
Lipo per salyginai nemazus daiktus jau is pradziu, bet “aklai”… Pergalvoju, perrasineju(jau 3cia karta) jo programa, dabar turetu but akselerometras/gyro, padu sensoriai, visiskai kitoks ejimo algoritmas tam, kad galetu eit per “kalnus”. Minciu daug del to “protingo ejimo”, reik tik kazkaip konvertuot viska i C.
šaunuolis, progreso variklis
o nuo “C” iki “O”, t.y. rato, jau visai nedaug