motoras
motoras
Tebūnie dar viena foto į hexapodo tematiką.
na gali ir daugiau  nu ir kas kad dienorasty yra. o tai greit jis sukas? nebus jis letas?
nu ir kas kad dienorasty yra. o tai greit jis sukas? nebus jis letas?
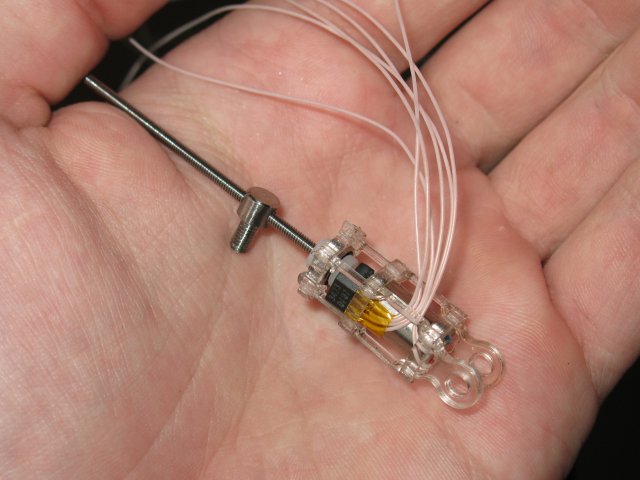
Kelintas toje aseleje sriegis ? 
M2 Pavara tekinta/sriegta iš titano.
geras geras, labai idomus inžinerinis sprendimas tos sliekinės pavarėlės  kokie čia el. varikliukai? kažkada galvojau kažką daryt iš mobiliųjų telefonų vibratorių mikrovarikliukų, bet jaučiu jie ner tokie galingi kad pasuktų kažką su apkrova, perdegtų iš kart… Na šitas darbas tai iš viso superinis… jau viską tobulai darai (nors pagalvojus: inžinieriai neturi laiko daryti kažką blogai, taip tiesiog švaistomas laikas…). kokios mintys apie magistrantūrą? nes šis tiktų pagal sudėtingumą puikiai ) tik kad jau bus padarytas, nors tai turbūt nėra problema vgtu… (nešti senus projektus)
kokie čia el. varikliukai? kažkada galvojau kažką daryt iš mobiliųjų telefonų vibratorių mikrovarikliukų, bet jaučiu jie ner tokie galingi kad pasuktų kažką su apkrova, perdegtų iš kart… Na šitas darbas tai iš viso superinis… jau viską tobulai darai (nors pagalvojus: inžinieriai neturi laiko daryti kažką blogai, taip tiesiog švaistomas laikas…). kokios mintys apie magistrantūrą? nes šis tiktų pagal sudėtingumą puikiai ) tik kad jau bus padarytas, nors tai turbūt nėra problema vgtu… (nešti senus projektus) 
Varikliukai tai čia tokie patys kaip mobylkų vibrikuose, tik didesni - 12.5*7mm (mobilkose 4mm). Tai varikliai iš peidžerių. Žinoma pirkti nauji ir be svarelių. Na jėgos tai realiom sąlygom (kad sugebėtų pakelti roboto koją) tai jie per mažai turi (sprendžiu iš pirmųjų testų). Mintys apie magistrantūrą negiamos - neturi universitetas ką man pasiūlyti (tik popierių). Ir taip jau iššvaisčiau savo geriausius 4 gyvenimo metus. Velniop magistrantūrą, užsieny nebent… O diplominiui tai darau tik “roboto kojos valdymo sistemą”, t.y. bus padaryta tik viena koja. Tai magistrantūroj teoriškai būtų ką veikt.