Idėja
Idėja
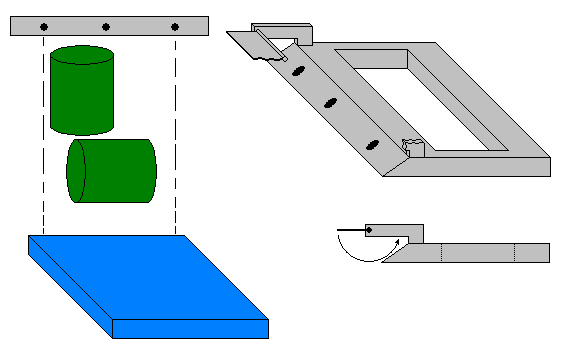
Čia prieš tai buvusiai foto šiokia tokia idėja. Šitas daiktas turėtų tvirtintis roboto priekyje. Trys taškai - sensoriai. Jei skardinė bet kokia padėtimi yra trumpesnė už katalogą, viskas paprasta: važinėjam, kol užsidengia kuris nors sensorius ir jei uždengtas vienas iš kraštinių - sukamės į tą pusę, jei abu kraštiniai - bandom apvažiuot, jei vidurinis, bet ne kraštiniai - susemiam. Sensoriai galėtų būti kažkas panašaus, kaip 99 sumobote, tik gal labiau kryptiški. O dėl kojinių, tai kaip kažkas minėjo, galima susirinkti jas gale roboto. Tiktų kažkas pan į šieno surinktuvą… 
Įdomu kaip ši sistema reaguos į gerojo elfos katalogo kampą. O šiaip mintis 
Reiktų, kad sensoriai veiktų ne tik prie pat kliūties, bet ir per atstumą šiokį tokį. Na, čia kalibravimo reikalas. Arba galima toliau rutulioti sensorių išdėstyo klausimą. Galima iš viršaus dar padaryt ar pan. Na, čia tokia idėja kol kas.
Organizatorių puslapyje rašo kad skardinės bus padėtos ant dugnu į viršu, tai kaip ir atpuola gulinčios skardinės variantas
gulincios skardines- tai pats realiausias variantas, kuris gali asirasti del neatsargaus roboto maneuravimo. gerai, surinkimas daleiskim veiks. o iskrovimas?
Iškrovimas gali būti tiesiog atkeliant visą šitą aparatą ir važiuojant atgal.
as dar pagalvojau (  ), ir nusprendziau pasidaryti tavo rinktuvo prototipa. jis turi viena privaluma- gali rinkti ne tik stovincias, bet ir gulincias skarbonkes. darysiu uz keliu dienu, kai bus padaryta, ismesiu klipuka. neaisku tik del galutinio rinktuvo dydzio sesiom atsitiktinai gulinciom skarbonkem, nes roboto ismatavimai 40x40x40cm maksimum, o reikia dar ir pavarai vietos palikti.
), ir nusprendziau pasidaryti tavo rinktuvo prototipa. jis turi viena privaluma- gali rinkti ne tik stovincias, bet ir gulincias skarbonkes. darysiu uz keliu dienu, kai bus padaryta, ismesiu klipuka. neaisku tik del galutinio rinktuvo dydzio sesiom atsitiktinai gulinciom skarbonkem, nes roboto ismatavimai 40x40x40cm maksimum, o reikia dar ir pavarai vietos palikti.
Na, mano mintis yra “galvok paprastai” nes čia tikrai be čiuptuvų galima apseiti. Turbūt…