A
A
 lygis ar pats draiverį parašei? kaip plokštelė pagaminta, kokio diametro via tarp sluoksnių, kiek sluoksnių?
lygis ar pats draiverį parašei? kaip plokštelė pagaminta, kokio diametro via tarp sluoksnių, kiek sluoksnių?
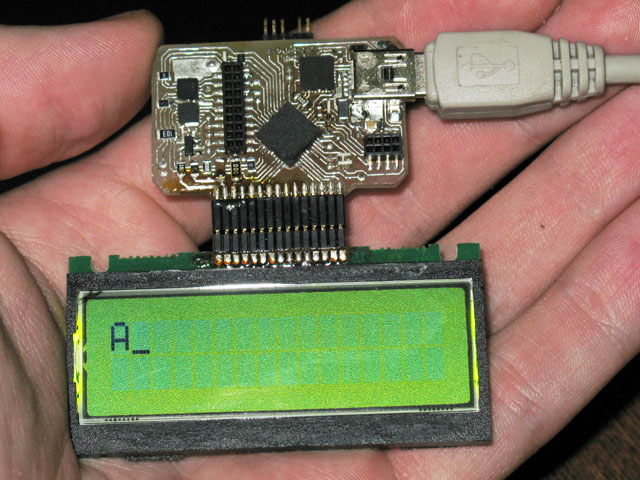
usb chipas CP210x(virtual com port),kontroleris sakyciau AVR, tik kad visas JTAG sumontuotas…, LCD 2x16, kaip suprantu 4bit rezimu. Plokste dvipuse, pagaminta naudojant fotorezista. Sutankinimas grazus, takeliai ~0.3mm. Bej is kur emei 1.27mm kontaktorius?
USB draiverio nerašiau (mikrovaldikliui reikės daug skaičiavimo resursų) - įkišau FT232RQ (RS232<->USB), kuris turi vidinį osciliatorių ir mikrovaldikliui (ATmega324P) duoda 24MHz CLK. LCD draiverį rašiausi pats (nebaigtas dar). Taip, LCD 4 bitų režime (neužteko uC kojų, išnaudotos visos iki vienos). Plokštė vienpusė, tačiau kitoje pusėje yra ~10 izoliuotų Kynar laidelių. Takeliai 0.25mm, via skylutės 0.35mm. Plokštė gaminta šiuo būdu: circuit.lt/?section=patarimai&page=pcbuvKontaktoriai pirkti Evitoje (už tai jiems labai didelis respectas)
sprendziant is paveiksliuko linke, tavo busimas voras tures custom lcd  tarp kitko, kokioje stadijoje darbai? gal jau begioja?
tarp kitko, kokioje stadijoje darbai? gal jau begioja?
Oi, stadija tai dar labai ankstyva. Šita plokštelė bus skirta tik vienos kojos valdymui. Šitą darbelį prakišinėsiu kaip bakalaurinį, tai dėl to pridėjau dar USB interfeisą ir LCD techninių duomenų įvedimui/išvedimui (vėliau jų nebus). Taip pat dar padaryta Tx/Rx jungtelė valdymo pultui. Ta didžioji jungtis bus jungiama prie mechanikos. Va dabar damušinėju kojos brėžinį (žr. mano dienoraštį), reikės surinkti mechaniką, sudėlioti visus sensorus, variklius… Tada apsiimti prograavimu.
{kind=link}